Statistics
The idea was to build a robot better
than my family. To investigated it, I made a statistical analysis of the robot when it was in its
fifth generation. More information about it:
here
So back then there was no python app to help me calibrate the robot. The sensors were also not so accurate, and the software was not that good. But still, we can see some interesting things.
For this statistical analysis I will compare my father, the robot and me by looking at the accuracy and precision of multiple shots.
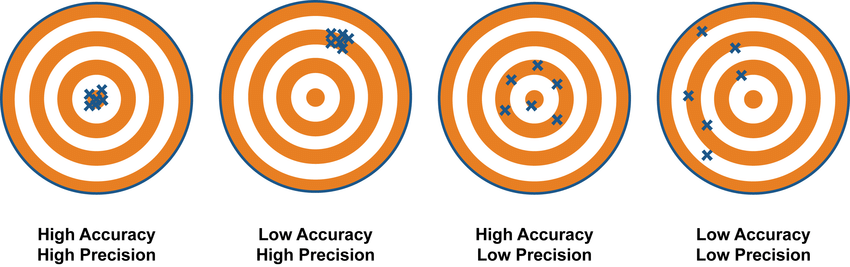
Precision and accuracy are in many fields used in the wrong way. Because my analysis focuses on these two different things, I think it’s important to explain the exact difference between them. Precision refers to the closeness the data is from each other. Let’s take our example of the dart board. If we shoot multiple times really close to each other, then we can say that our shots are precise. Accuracy refers to the closeness of the data from the true value. Let’s say we play darts multiple times and for each throw we try to shoot in the center. If the data is close to the center, then we can say that our shots are accurate.
For precision, we compare our data from the other data of the same experiment. While in accuracy we compare our data to the main objective our data was meant to have. (Professor Dave Explains, youtube)
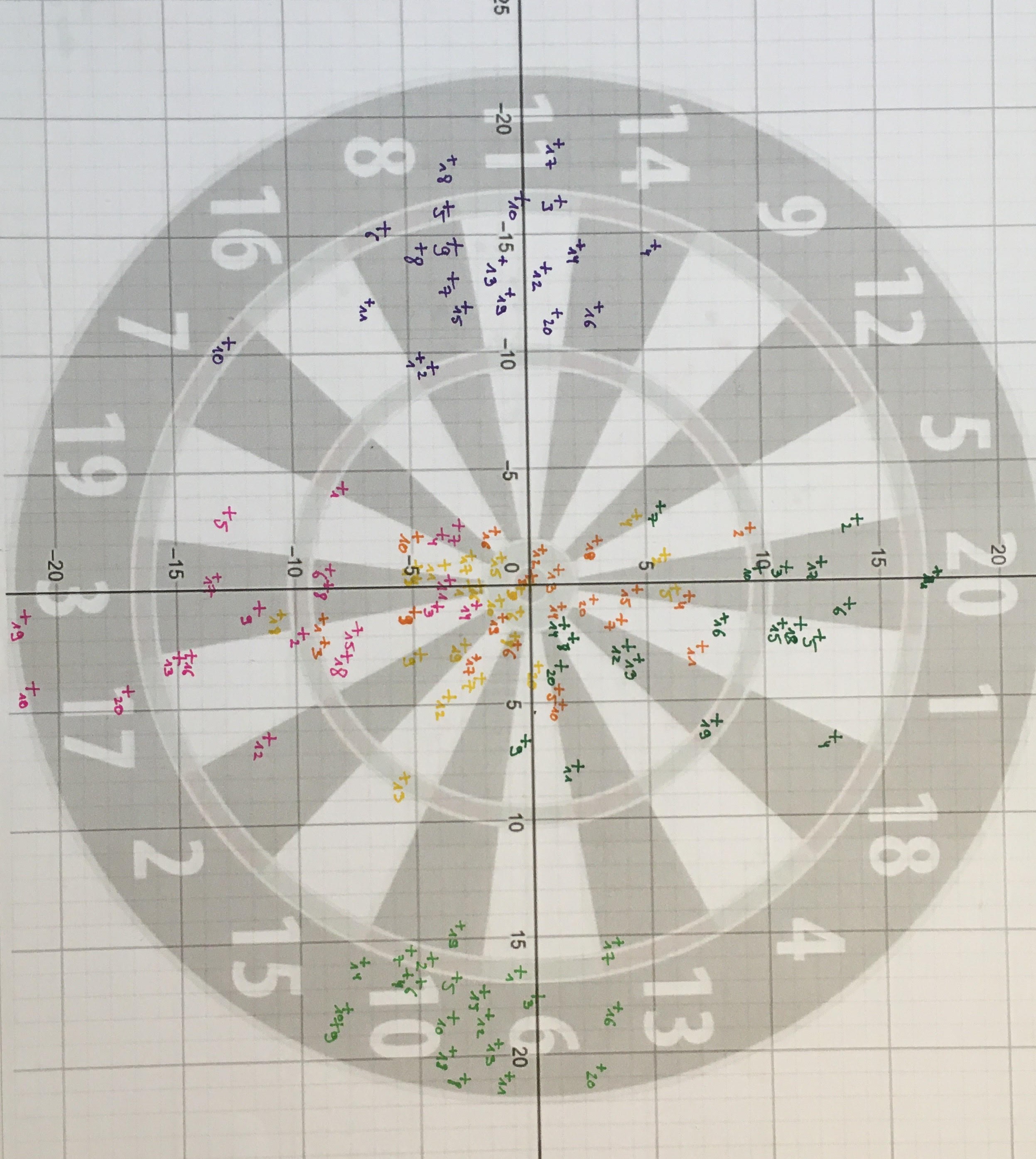
The experiment I decided to do to compare my father, the robot and me was to shoot 120 times in series of 20. For every shot we will alternate from target. These will be in order: (0, 10), (0, 0), (0, -10), (-10, 0), (0, 0) and (10, 0). (For the robot I asked to shoot in (-15, 0) and (15, 0) instead of (-10, 0) and (10, 0). Therefore, I will translate all values for 5 centimeters. Normally this won’t have any consequences.
The reason why I chose 6 zones is because the robot then needs to position itself to a new position for each new throw.
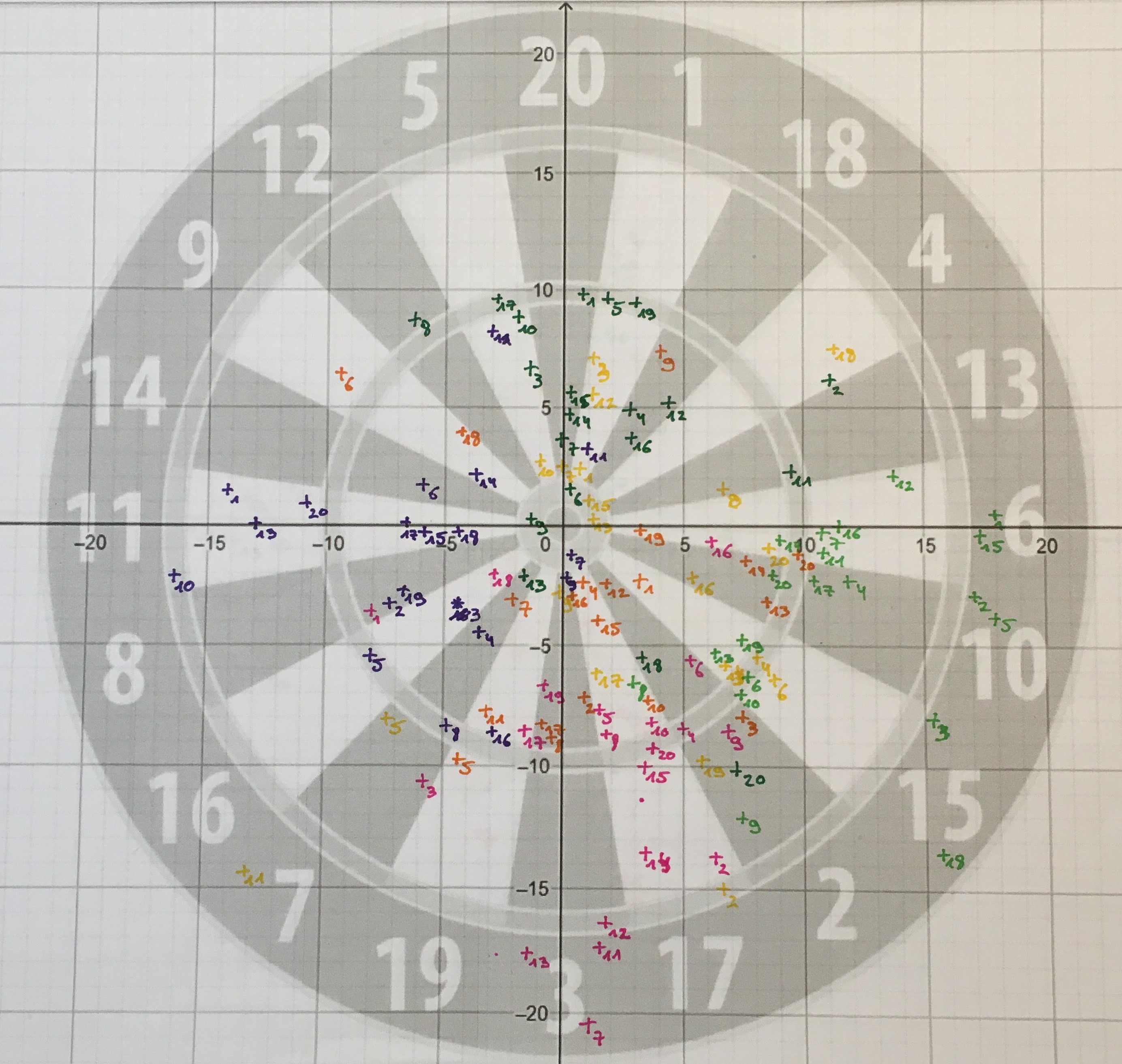
 I decided to make box plots and normal distributions of all these shots.
How smaller the box plot and normal distribution, how precise and so how
better it is.
I decided to make box plots and normal distributions of all these shots.
How smaller the box plot and normal distribution, how precise and so how
better it is.
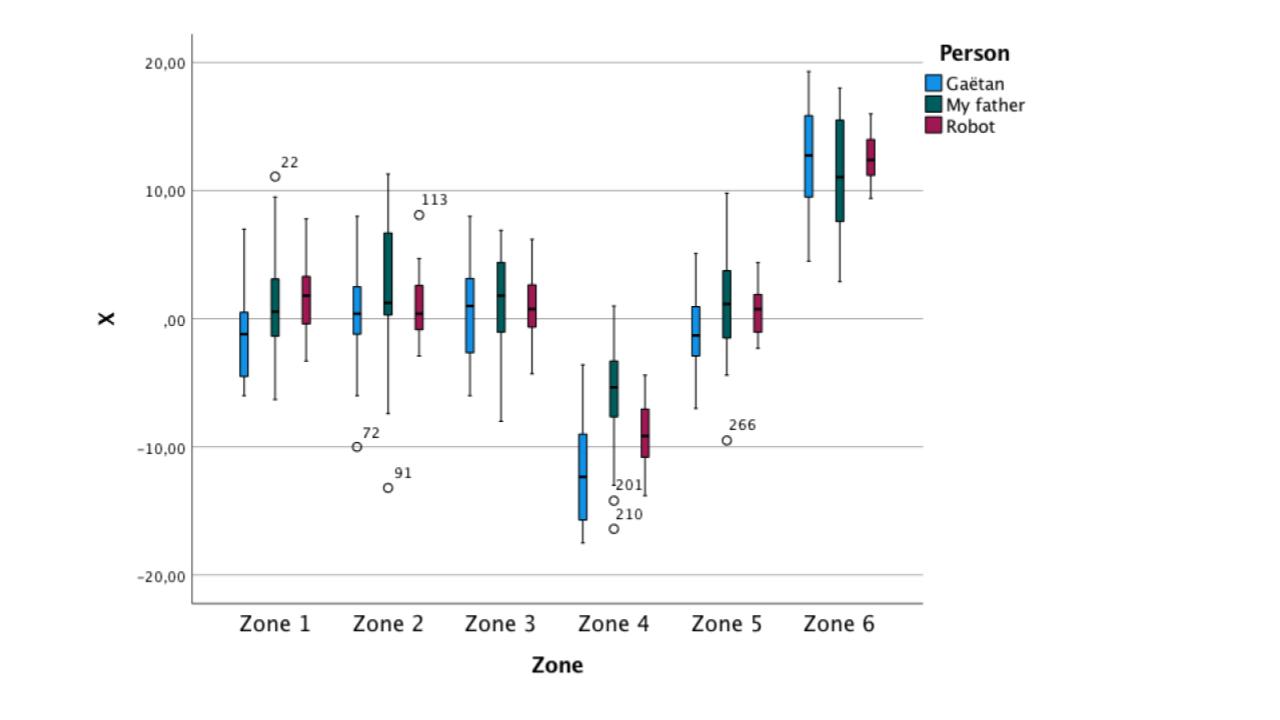
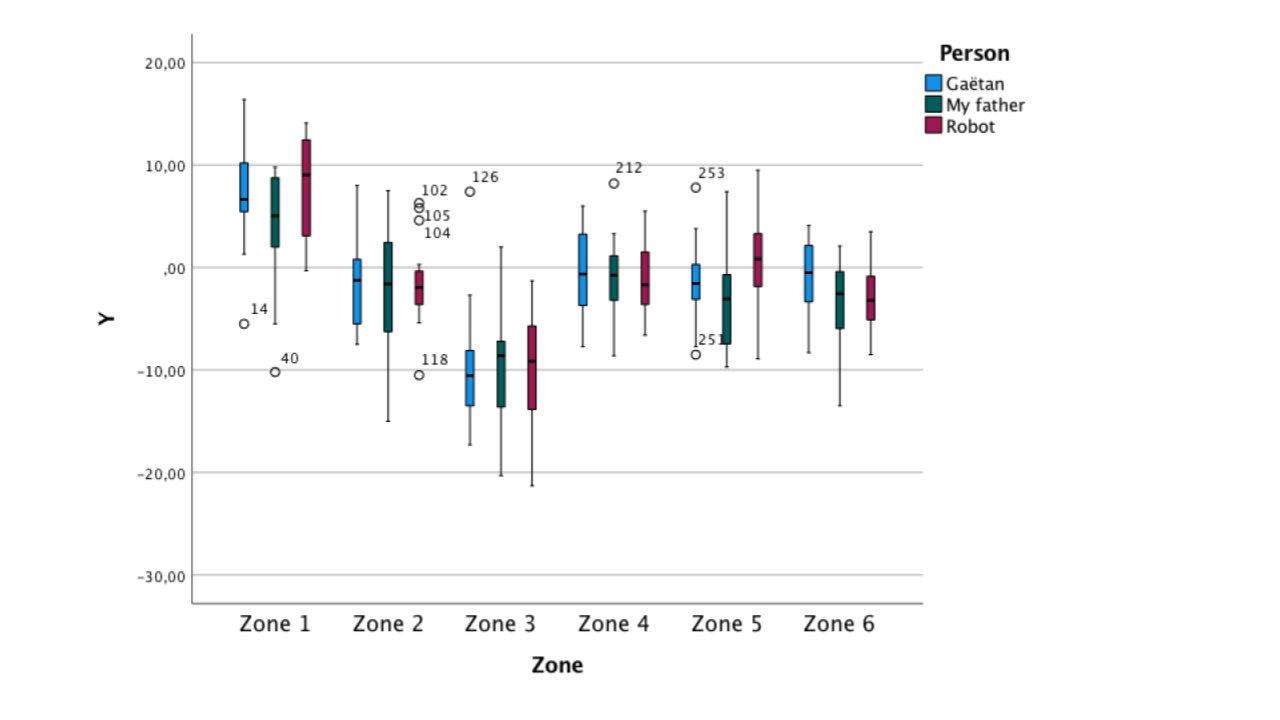
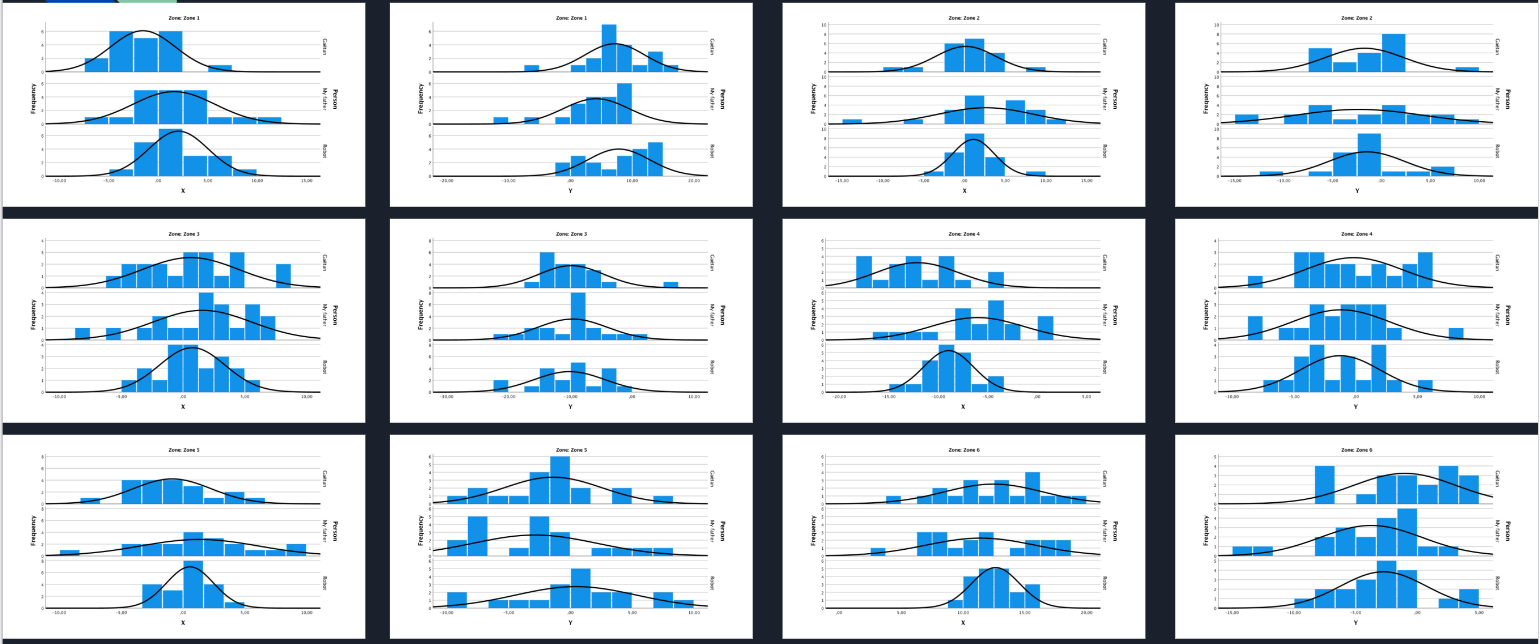
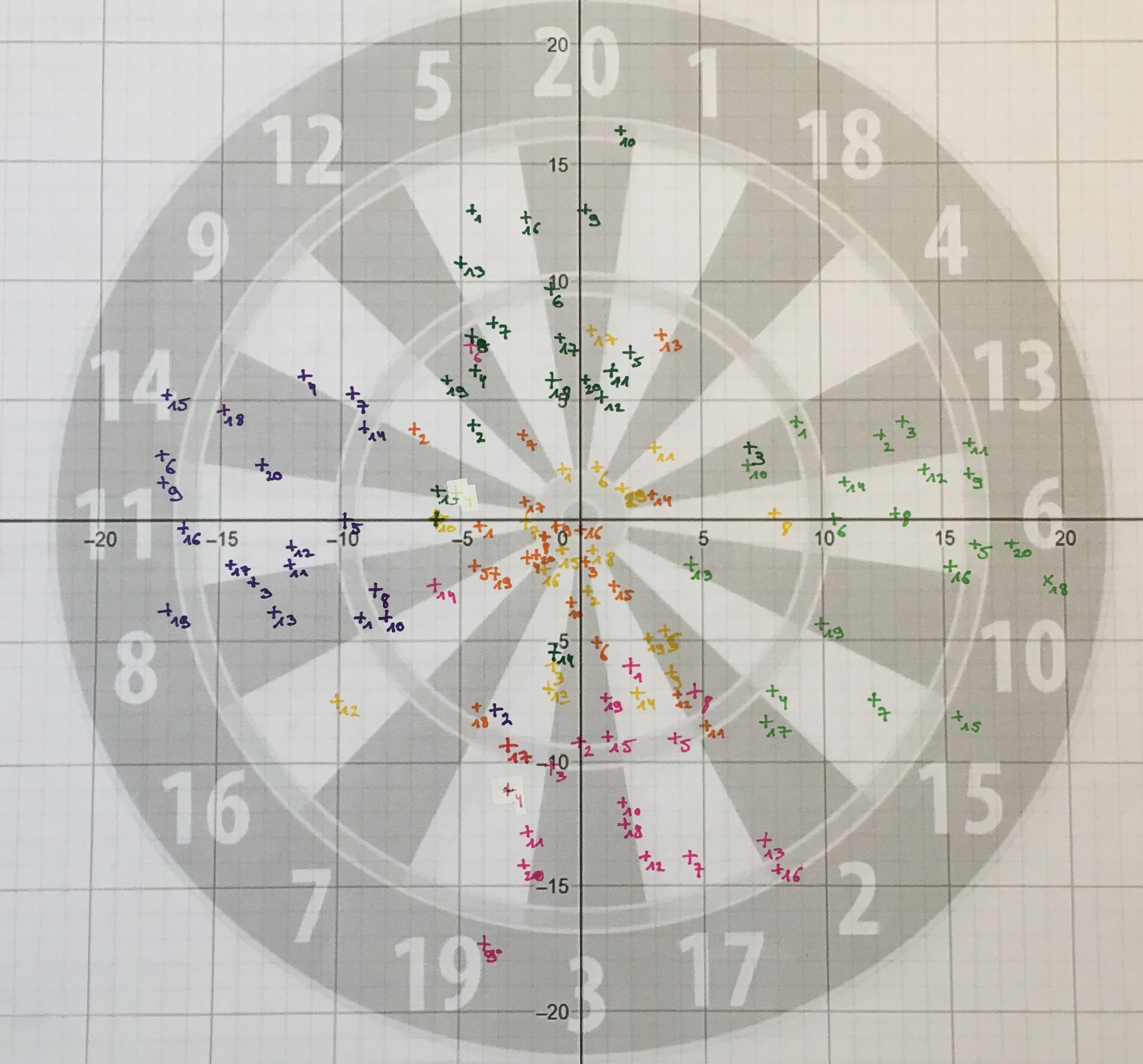
From these graphs, we can conclude that the robot is the most precise between our three. We can also see that I am more precise than my father. About the accuracy, we can compare the means. How closer the mean is from the target, how better. From the following table we can see that the robot and me are the closest from the target in respectively 6 and 5 of the 12 cases. This means both are even as accurate.
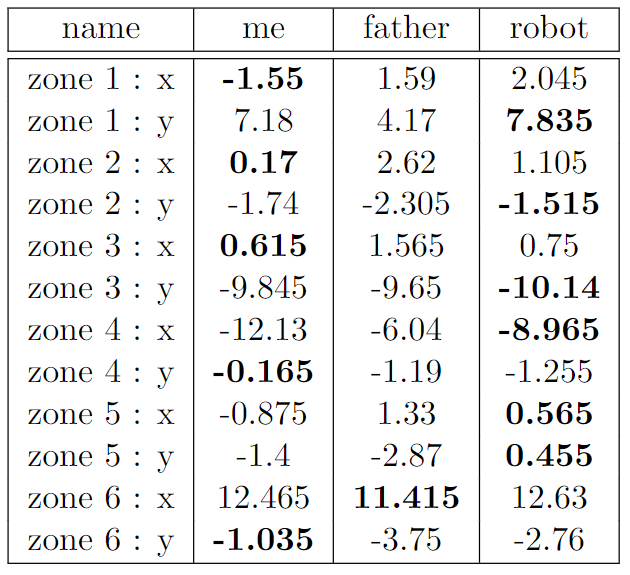
Overall, we can see that the robot is more accurate in the horizontal rather than vertical directionally. This can be explained because the path the darts follow if we’re looking from above is just a constant f(x) = C. However, if we look from above when a human is playing then the path is more a f(x) = ax + b, which is more complex and so more difficult to shoot right. If we look at the path from the side, then we can see that for both human and robot the curve is a parabola f(x) = ax2 + bx + c. Here we can also see that I am more accurate than the robot.
All these conclusions must be taken with a grain of salt because my conclusions are based on 120 shots, to improve their significance, a larger number of shots must be analyzed. Another important factor is that this experiment was executed in March.
The robot has since been upgraded significantly. The shots are more precise, and the python app make the robot (= see : https://getgetstechno.github.io/ThunderCode.io/DRprototypeVI.html) more accurate. So, the robot is better than my father and me.
So back then there was no python app to help me calibrate the robot. The sensors were also not so accurate, and the software was not that good. But still, we can see some interesting things.
For this statistical analysis I will compare my father, the robot and me by looking at the accuracy and precision of multiple shots.
Precision and accuracy are in many fields used in the wrong way. Because my analysis focuses on these two different things, I think it’s important to explain the exact difference between them. Precision refers to the closeness the data is from each other. Let’s take our example of the dart board. If we shoot multiple times really close to each other, then we can say that our shots are precise. Accuracy refers to the closeness of the data from the true value. Let’s say we play darts multiple times and for each throw we try to shoot in the center. If the data is close to the center, then we can say that our shots are accurate.
For precision, we compare our data from the other data of the same experiment. While in accuracy we compare our data to the main objective our data was meant to have. (Professor Dave Explains, youtube)
The experiment I decided to do to compare my father, the robot and me was to shoot 120 times in series of 20. For every shot we will alternate from target. These will be in order: (0, 10), (0, 0), (0, -10), (-10, 0), (0, 0) and (10, 0). (For the robot I asked to shoot in (-15, 0) and (15, 0) instead of (-10, 0) and (10, 0). Therefore, I will translate all values for 5 centimeters. Normally this won’t have any consequences.
The reason why I chose 6 zones is because the robot then needs to position itself to a new position for each new throw.
From these graphs, we can conclude that the robot is the most precise between our three. We can also see that I am more precise than my father. About the accuracy, we can compare the means. How closer the mean is from the target, how better. From the following table we can see that the robot and me are the closest from the target in respectively 6 and 5 of the 12 cases. This means both are even as accurate.
Overall, we can see that the robot is more accurate in the horizontal rather than vertical directionally. This can be explained because the path the darts follow if we’re looking from above is just a constant f(x) = C. However, if we look from above when a human is playing then the path is more a f(x) = ax + b, which is more complex and so more difficult to shoot right. If we look at the path from the side, then we can see that for both human and robot the curve is a parabola f(x) = ax2 + bx + c. Here we can also see that I am more accurate than the robot.
All these conclusions must be taken with a grain of salt because my conclusions are based on 120 shots, to improve their significance, a larger number of shots must be analyzed. Another important factor is that this experiment was executed in March.
The robot has since been upgraded significantly. The shots are more precise, and the python app make the robot (= see : https://getgetstechno.github.io/ThunderCode.io/DRprototypeVI.html) more accurate. So, the robot is better than my father and me.
Reflection on the project :
During this project I learned several things. The nature of trial and error tells me there will never be an end
to this project. The robot can always be improved. This project is not really useful. It won’t change the world
but at least I learned a lot of things related to engineering. First, the difference between theory and practice.
In theory you can calculate the exact forces and energy needed to shoot the dart. However, friction and the fact
that I am using Lego and cheap motors makes the theory impossible to use. I need other elastics and way more
powerful motors for example. I also learned to be patient. When something is not working, you can sometimes
search for hours and start all from the beginning to finally discover that one wire was just not connected.
Another thing is that on internet you can find lot of information related to Arduino and mechanics. That’s very
nice but the problem is that you only learn one aspect at a time. You can find tutorials for stepper motors and
for sensors but it’s hard to find tutorials that bundle all this together to make for example a working robot.
SCIENCE EXPO BELGIUM 2022 :
I developed this project while being in last year of my school (17-18 years old class). There all students had to make a research paper based on there main courses. I decided to go for physics and include my passions for electronics and building stuff. I already wanted to build this robot and this was the good opportunity to finish this project due to the pression and motivation that came from working on a research project.
But a couple of months started I saw a lot of potential in this project seen all the time that I putted in it already and so I decided to try to go a step further. I decided to participate to several contest in Belgium in hope to win prices and met people who share same interests as me. Be able to share my project and so get some attentions will after all be the greatest gift I got from all these contest.
The first contest I did was coolest project from CoderDojo Belgium. There I won one price of 50 euros which I used to buy other electronic components. Another activity I did was Maker Faire Ghent. There is no price to win but again sharing my project with other people like me is always a pleasure.
The last big contest I did was SCIENCE-EXPO Belgium. The objective there is that young people like me present a project they want and after 2 days of intense presentation in front of jury members and visitors you may win some prices. There I had the unique opportunity to win 2 major prices. One was to represent Belgium in Suceava, Romania during the European Science Expo and the other was to represent Belgium for EUCYS, the EUropean Contest for Young Scientist in Leiden, Netherlands.
But a couple of months started I saw a lot of potential in this project seen all the time that I putted in it already and so I decided to try to go a step further. I decided to participate to several contest in Belgium in hope to win prices and met people who share same interests as me. Be able to share my project and so get some attentions will after all be the greatest gift I got from all these contest.
The first contest I did was coolest project from CoderDojo Belgium. There I won one price of 50 euros which I used to buy other electronic components. Another activity I did was Maker Faire Ghent. There is no price to win but again sharing my project with other people like me is always a pleasure.
The last big contest I did was SCIENCE-EXPO Belgium. The objective there is that young people like me present a project they want and after 2 days of intense presentation in front of jury members and visitors you may win some prices. There I had the unique opportunity to win 2 major prices. One was to represent Belgium in Suceava, Romania during the European Science Expo and the other was to represent Belgium for EUCYS, the EUropean Contest for Young Scientist in Leiden, Netherlands.
ESE 2022 - SUCEAVA ROMANIA
In July 2022 I had the opportunity to represent Belgium for the European Science Expo in Suceava, a small town in Romania close to the border with Moldavia. Weeks before it the war between Ukraine and Russia started so I went there with little presumptions. Other than that I had a wonderful time there. I met a lot of good people and it was really nice to share my projects among others where there is no competition at all. The primary objective is to share knowledge among people who won prices in their national country. I also got the chance to discover other communities and culture aspect that I would probably not have discovered in my live. Romania is a beautiful country with lot of potential. Thanks to the Belgian and Romanian organizers for organizing it and making it such a good trip.
EUCYS 2022 - LEIDEN NETHERLANDS
In September 2022 I got the chance to participate at EUCYS 2022. Way more challenging than ESE, due to the fact that it is organized by the European Union and that it is officially a contest which means lot of prizes can be win. I went there to win a prize but I immediately saw that I didn’t had lot of chance to win due to the fact that other teams and nations had put way more effort in their research than me and that their ideas where more challenging and useful than mine. But nevertheless it was an incredible week. I met there incredible people and got the time of my life there. Even though everyone was aware of the prizes and so the concurrence between the projects, the organizers made lot of activities to make sure everyone had a great time. Thanks for that!
During the week I gave lot of explanations and demos of my robot to the jury and to visitors. My mindset was that I had nothing to lose and so as long as the winners were not announced I could still win a prize or so. At the award ceremony I was incredibly surprised to win the third prize, containing 3.500 euros. Not only the money but everything besides it changed my life. I feel way more confident and got convinced that engineering was probably the right path for me. It is for me also a great example of motivation where people can with the right motivation and support realize everything they want and climb high is ranks.
During the week I gave lot of explanations and demos of my robot to the jury and to visitors. My mindset was that I had nothing to lose and so as long as the winners were not announced I could still win a prize or so. At the award ceremony I was incredibly surprised to win the third prize, containing 3.500 euros. Not only the money but everything besides it changed my life. I feel way more confident and got convinced that engineering was probably the right path for me. It is for me also a great example of motivation where people can with the right motivation and support realize everything they want and climb high is ranks.
AFTERMATH
Due to all these trips and prizes I saw the biggest improve on my mental health. It really made a bit step in my personal motivation and confidence that I for sure needed before going to the university. Until this day I feel deeply recognizance to the organizers and the volunteers working for the Jeunesse Scientifique de Belgique, the organisers of the Belgian Science Expo where everything started. After Leiden I wanted to contribute to this beautiful mission of raising curiosity and sensitivity among childrens for science. That’s why I volunteer as a board member inside JSB and help volunteer during some activities like the national Science Expo. There I also got the chance to volunteer for EUCYS 2023 which once again gave me souvenirs of the wonderful time of EUCYS 2022.